
原文发表在天池实验室, 决赛答辩视频(第55分钟开始) 第一次参加天池的比赛,主要是被题目的实用性所吸引,物流货物限制品监测要求监测X光图像是否包含危险品并标出。自动化监测包裹、行李的携带品有相当广的应用前景。本文对比赛进行回顾,描述对问题的分析,方案思路以及改进和涨分点,源码分享在github。
Category: 技术
人工智能和机器人相关技术
英特尔的RealSense技术发布了有两年了,但是应用一直不温不火,无人机、独轮车、 Turtlebot等都有使用,但是还没有见到让人眼前一亮的应用。 英特尔最新的欧几里得(Euclid)开发套件有望改变这一现状——通过集成技术将大量的传感器集成到计算棒(电脑棒)中——英特尔希望通过更好的开箱即用体验吸引开发者,以推广RealSense技术。 在英特尔网上预定之后,在6月2日收到了第一批Euclid套件,先看看都有什么: 盒子正面:

配置SSH 通过 控制面板 > 终端机和 SNMP > 终端机 启用ssh功能 修改端口,减少受攻击的可能 SSH 仅支持属于 administrators 群组的帐户登录系统 修改/etc/ssh/sshd_config文件关闭使用密码登陆 PasswordAuthentication no 通过 控制面板 > 安全性 > 账户 启用自动封锁,可封锁登陆尝试失败次数过多的IP

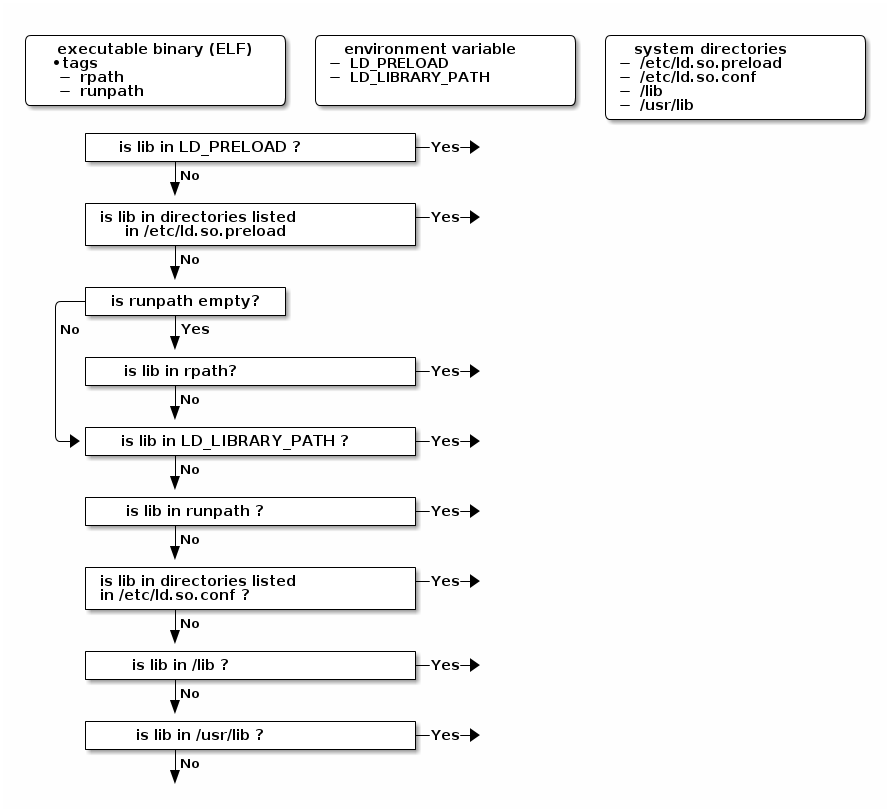
Caffe是非常流行的深度学习库,ROS是当下使用最广泛的机器人库(我觉得叫操作系统有些过),把Caffe和ROS一起使用就很方便地将深度学习技术应用到机器人上,但是现在的Caffe各种fork(通常都是对基本的卷积神经网络扩展),所以使用Caffe最方便的还是从源码(和fork)编译。所以这里记录如何将Caffe作为ROS模块的库使用。